AROS rom versus AROS adf version mismatch
Last updated on 12 hours ago
CoolCat5000Member
Posted 3 days agoCoolCat5000Member
Posted 1 day agodeadwoodAROS Dev
Posted 1 day agoCoolCat5000Member
Posted 1 day ago AMIGASYSTEMDistro Maintainer
AMIGASYSTEMDistro MaintainerCoolCat5000Member
Posted 24 hours ago
CoolCat5000Member
Posted 23 hours agoCoolCat5000Member
Posted 19 hours agoEdited by CoolCat5000 on 28-06-2026 23:06, 17 hours ago
2 users reacted to this post
deadwood, Farox
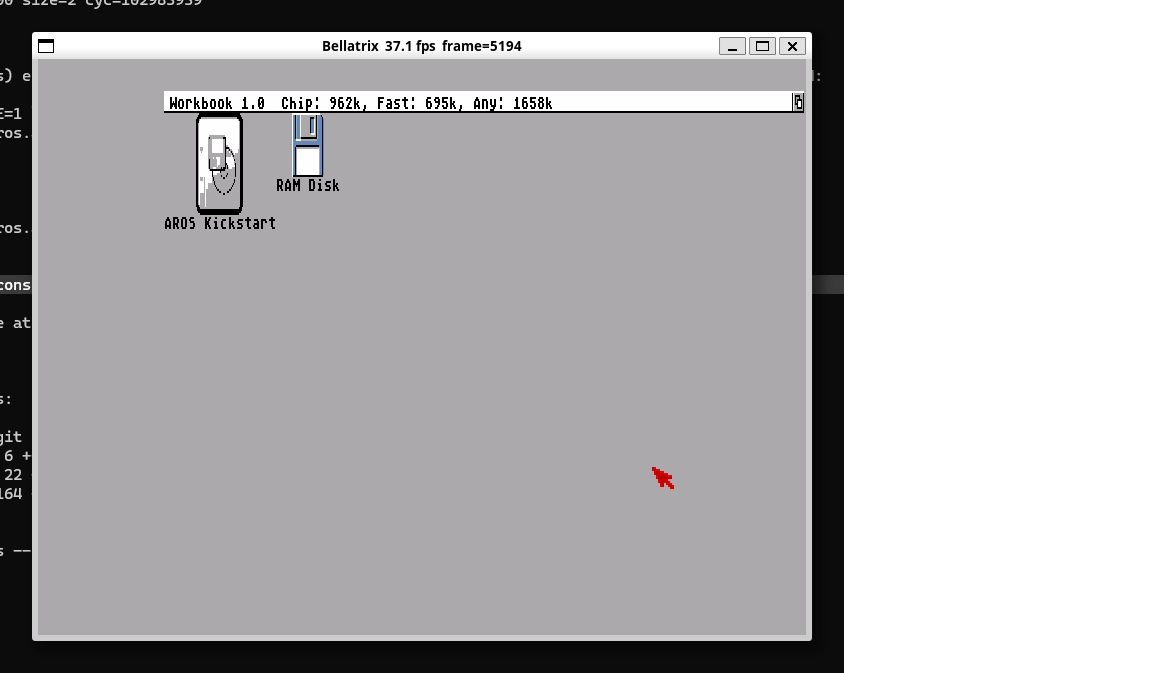
CoolCat5000 attached the following image:
AMIGASYSTEMDistro MaintainerCoolCat5000Member
Posted 12 hours agoEdited by CoolCat5000 on 29-06-2026 04:33, 12 hours ago
You can view all discussion threads in this forum.
You cannot start a new discussion thread in this forum.
You cannot reply in this discussion thread.
You cannot start on a poll in this forum.
You cannot upload attachments in this forum.
You can download attachments in this forum.
You cannot start a new discussion thread in this forum.
You cannot reply in this discussion thread.
You cannot start on a poll in this forum.
You cannot upload attachments in this forum.
You can download attachments in this forum.
Moderator: Administrator, Moderators